
Lecture: FLOAT & SWIM – Novel Meso-Scale Robots for Extreme Lunar and Ocean World Environments
Speaker: Ethan W. Schaler, PhD - Jet Propulsion Laboratory
Monday, July 11, 2022
5:00 P.M. Lecture
4:30 P.M. Reception
Lees-Kubota Lecture Hall – 101 Guggenheim Lab, California Institute of Technology
Abstract:
As NASA seeks to explore ever-more extreme environments in the coming decades, two NASA Innovative Advanced Concepts (NIAC) Phase I studies – FLOAT and SWIM – investigate novel solutions for the unique environmental, operational, and design constraints imposed on two types of robots operating on the Moon and Ocean Worlds.
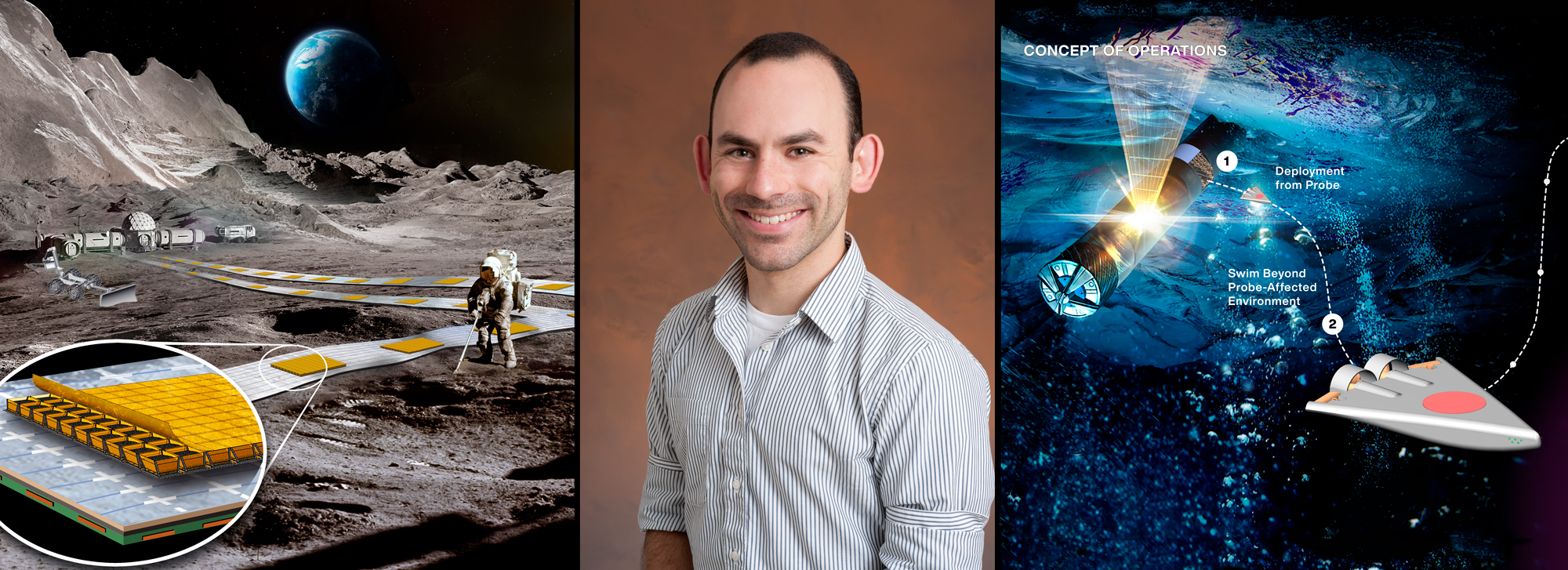
For FLOAT – Flexible Levitation On A Track – we consider the challenges of building the first lunar railway system, to provide reliable, autonomous, and efficient payload transport on the Moon in support of ISRU (in-situ resource utilization) and ECO (excavation, construction, and outfitting) activities, with the capacity to move >100,000 kg of regolith multiple kilometers per day while consuming <10 kW of power and operating under harsh lunar conditions imposed by abrasive dust, thermal deltas, and vacuum. Our proposed platform uses dozens to thousands of passively-levitating magnetic robots that are controllably propelled over a flexible film track.
For SWIM – Sensing With Independent Micro-swimmers – we study the idea of using dozens of miniature underwater robots, each approximately the size of a cell phone, to characterize the physical / chemical properties of ice-ocean interfaces on Ocean Worlds in search of signs of extant life. Ocean Worlds – especially Enceladus, Europa and Titan – are some of the most likely locations beyond Earth to harbor life, but have liquid water oceans hidden beneath kilometers of icy crust, with unknown currents, high pressures, and limited ability to send data back to Earth.
Speaker's Biography:
Ethan Schaler is a robotics mechanical engineer at the NASA Jet Propulsion Laboratory at the California Institute of Technology. With backgrounds in electrical engineering (Ph.D.), mechanical engineering (B.S.) and micro/nanotechnology (M.Phil.), Schaler collaborates with researchers in a variety of disciplines to design, build and test robotic systems at micrometer to meter scales. In the past, he's made flexible grippers, miniature legged robots and high-voltage actuators. Lately, he’s been brainstorming ideas for new robots to explore unique corners of our solar system.
Schaler is NIAC Fellow on two separate projects – FLOAT (a levitating transport system for the moon) and SWIM (a swarm of miniature underwater robots for Ocean Worlds) – but spends the majority of his time on work related to the Mars 2020 (M2020) Perseverance rover. Schaler currently leads a team providing data trending and long-term performance analysis of the rover’s Sampling & Caching Subsystem, performs tactical downlink for the M2020 Robotic Arm, and is training to become an M2020 Rover Planner. Schaler also provides robotic arm analysis support for both the M2020 Robotic Arm and COLDArm (a NASA / JPL-Caltech technology demonstration mission).