







Project Overview:
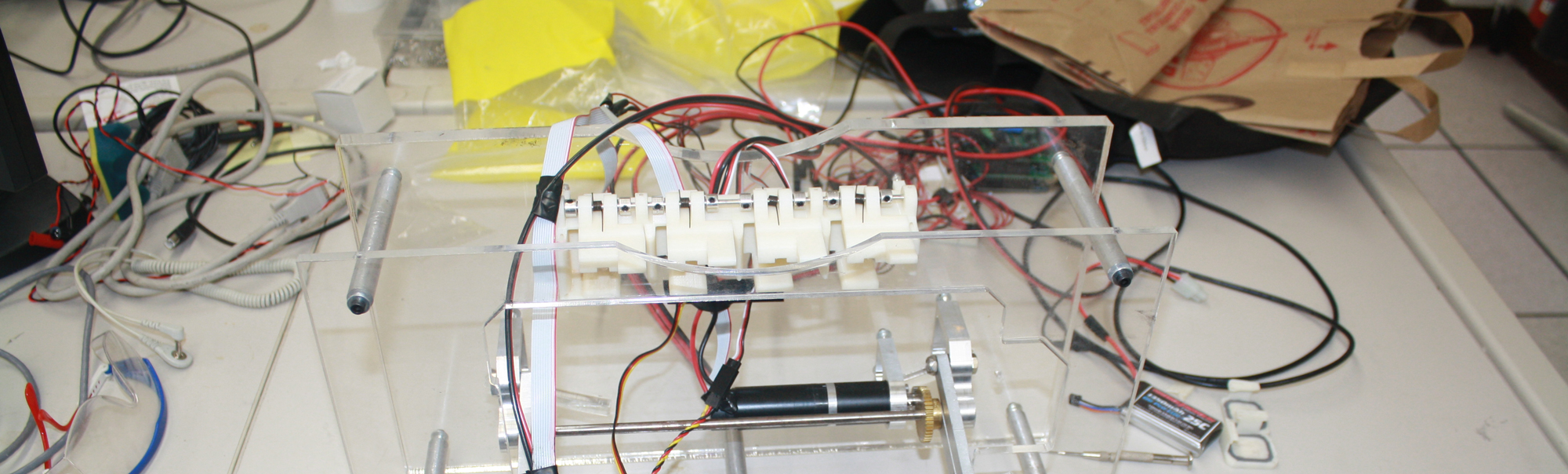
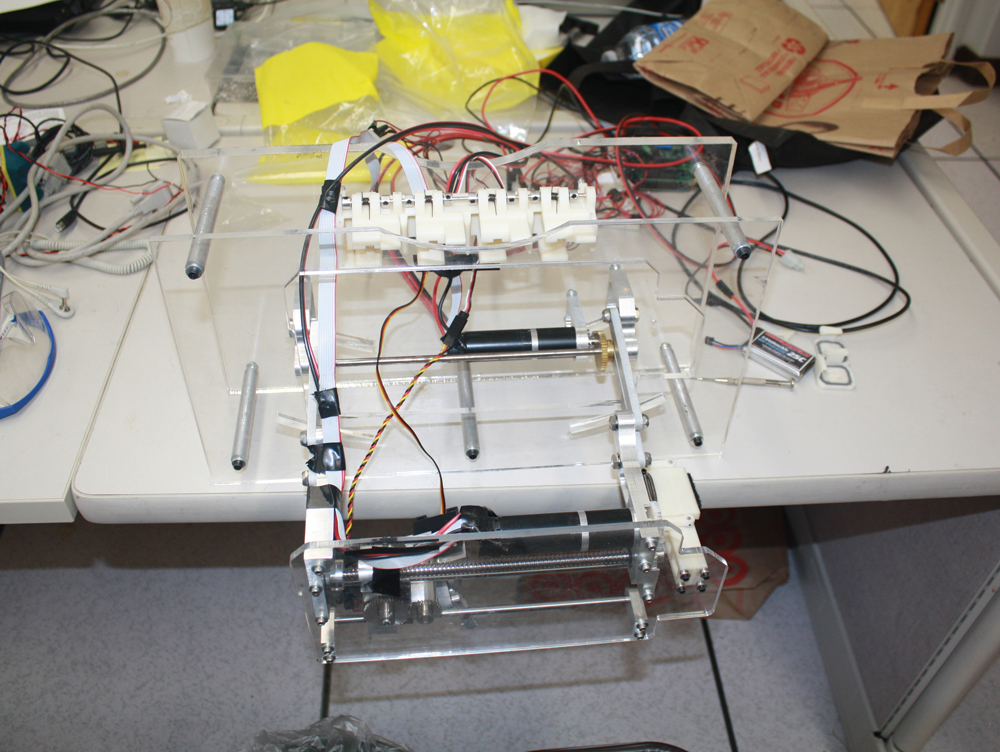
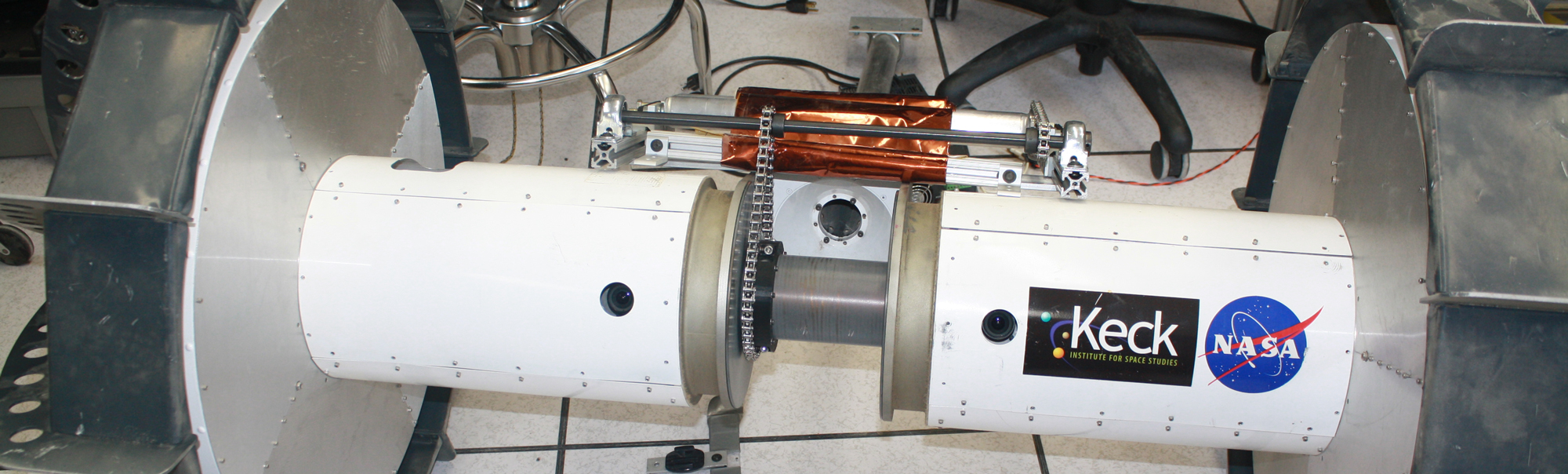
Extreme-terrain robots such as JPL’s Axel rover are enabling access to new and exciting science opportunities. The goal of this program was to develop a compact sampling instrument for Axel. Over the summer of 2012, a small group of students designed, built, and tested prototype sampling devices. Nikola Georgiev created a versatile four-degree-of-freedom scoop, which can acquire up to 4 different samples in clean self-sealing containers. Hima Hassenruck-Gudipati studied percussive scooping, and prototyped a percussive scoop that takes advantage Axel’s independent body rotation to acquire samples. Kristen Holtz and Yifei Huang collaborated on a pneumatic sampling system, which uses a puff of air to propel loose grains into flexible tubing, and separates the grains into an interchangeable sample container. Each of these sampling systems has been demonstrated, and each proved useful for different conditions. In turn, the students gained valuable design experience and the opportunity to work alongside a number of experts in various fields.